Dokumen tersebut memberikan penjelasan tentang rumus-rumus dasar untuk menghitung parameter-parameter penting motor listrik seperti kecepatan sinkron, slip, arus, daya, efisiensi, torsi, dan sebagainya dengan contoh penerapan rumus-rumus tersebut.
Aktuator adalah peralatan mekanis untuk menggerakan atau mengontrol sebuah mekanisme atau sistem. Pada sistem robot, aktuator ini sebagai elemen yang mengjonversi besaran listrik analog menjadi besaran lainnya sehingga dapat menghasilkan gerakan pada robot. Terdapat beberapa jenis aktuator yang bisa digunakan dalam robot salah satunya adalah motor listrik
Motor listrik adalah alat untuk mengubah energi listrik menjadi energi mekanik. Terdapat 2 jenis motor listrik yaitu :
Motor AC (Alternating Current), Motor AC adalah motor listrik yang menggunakan arus bolak balik (Alternating Current). Motor ini sering digunakan di skala industri yang besar. Motor ini juga disebut juga motor Induksi
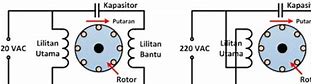
Prinsip kerja motor listrik indusksi sedikit berbeda dengan prinsip kerja motor DC. Dalam motor induksi single phasa atau biasa kta sebut dalam bahasa indonesia adalah motor satu phase, ketika supply satu phase diberikan ke belitan stator, berdenyut menghasilkan medan magnet dan dalam motor induksi tiga phase, ketika supply tiga phase diberikan ke belitan stator tiga phase, berputar dan menghasilkan medan magnet. Rotor dari motor induksi adalah tipe either wound atau tipe squirrel cadge. Apa pun jenis rotornya, konduktor di atasnya disingkat pada akhirnya untuk membentuk loop tertutup. Karena medan magnet yang berputar, fluks melewati celah udara antara rotor dan stator, menyapu melewati permukaan rotor dan memotong konduktor rotor.
Oleh karena itu menurut hukum Faraday tentang induksi elektromagnetik, akan ada arus induksi yang mengalir dalam konduktor rotor tertutup. Jumlah arus yang diinduksikan sebanding dengan tingkat perubahan hubungan fluks sehubungan dengan waktu. Sekali lagi laju perubahan hubungan fluks ini sebanding dengan kecepatan relatif antara rotor dan medan magnet yang berputar. Sesuai hukum Lenz rotor akan mencoba untuk mengurangi setiap penyebab menghasilkan arus di dalamnya. Karenanya rotor berputar dan mencoba mencapai kecepatan medan magnet yang berputar untuk mengurangi kecepatan relatif antara rotor dan medan magnet yang berputar.
Video Prinsip Kerja Motor Induksi
Motor DC adalah motor listrik yang menggunakan arus searah (Direct Current). Motor ini sering digunakan untuk robot skala kecil.
Prinsip kerja Motor DC terutama tergantung pada aturan Tangan Kiri Fleming. Pada motor DC dasar, armature atau rotor ditempatkan di antara kutub magnet. Jika lilitan pada rotor dipasok sumber daya DC eksternal, arus mulai mengalir melalui konduktor rotor. Ketika konduktor membawa arus di dalam medan magnet, mereka akan mengalami gaya yang cenderung memutar dinamo. Misalkan konduktor rotor di bawah kutub N magnet medan, membawa arus ke bawah (persilangan) dan yang di bawah kutub S membawa arus ke atas (titik). Dengan menerapkan Aturan Tangan Kiri Fleming, arah gaya F, yang dialami oleh konduktor di bawah kutub N dan gaya yang dialami oleh konduktor di bawah kutub S dapat ditentukan. Ditemukan bahwa setiap saat kekuatan yang dialami oleh konduktor berada sedemikian rupa sehingga mereka cenderung memutar dinamo.
Sekali lagi, karena rotasi konduktor di bawah kutub N berada di bawah kutub S dan konduktor di bawah kutub S berada di bawah kutub N. Sementara konduktor beralih dari kutub N ke kutub S dan kutub S ke kutub N, arah arus yang melalui mereka, dibalikkan dengan menggunakan commutator. Karena pembalikan arus, semua konduktor berada di bawah kutub N membawa arus ke arah bawah dan semua konduktor berada di bawah kutub S membawa arus dalam arah ke atas seperti yang ditunjukkan pada video animasi di bawah. Oleh karena itu, setiap konduktor datang di bawah N-pole mengalami kekuatan dalam arah yang sama dan sama juga berlaku untuk konduktor berada di bawah S-kutub. Fenomena ini membantu mengembangkan torsi terus menerus dan searah.
Video Prinsip Kerja Motor DC
Beberapa hal yang harus diperhatikan ketika memilih motor listrik untuk robot adalah tegangan kerja motor, arus motor serta torsi yang dihasilkan dari motor.
Berikut ini adalah contoh penggunaan motor listrik di robot :
Video Contoh Penggunaan Motor DC di Robot
We use cookies to ensure that we give you the best experience on our website. If you continue to use this site we will assume that you are happy with it.
Ruko Mediterania, Jl. Galuh Mas Raya, Blok A no. 17, RT003/RW15, Kelurahan Sukaharja, Kecamatan Teluk Jambe Timur, Kabupaten Karawang, Jawa Barat
Senin - Sabtu : 09:00 - 17:00
Ruko Mediterania, Jl. Galuh Mas Raya, Blok A no. 17, RT003/RW15, Kelurahan Sukaharja, Kecamatan Teluk Jambe Timur, Kabupaten Karawang, Jawa Barat
Senin - Sabtu : 09:00 - 17:00
Inverter Dan Rumus Menghitung Putaran Motor



